前沿研究综述:无人驾驶汽车测试场景构建关键技术综述
《汽车工程》第4期为“汽车智能网联技术专刊”,编辑部将为读者推荐6篇论文,以期引发行业对该论文的关注和有关技术的交流与讨论。
基于场景的虚拟测试方法是评价无人驾驶汽车安全性的有效途径,而如何在现有数据资源的基础上高效构建测试场景,是基于场景的虚拟测试方法的技术难题。
论文采用归纳总结的方法,在系统分析最新相关文献及研究资料的基础上,分别从场景定义与架构、场景信息提取与挖掘方法、虚拟测试应用等方面对无人驾驶测试场景的研究现在的状况进行了综述。
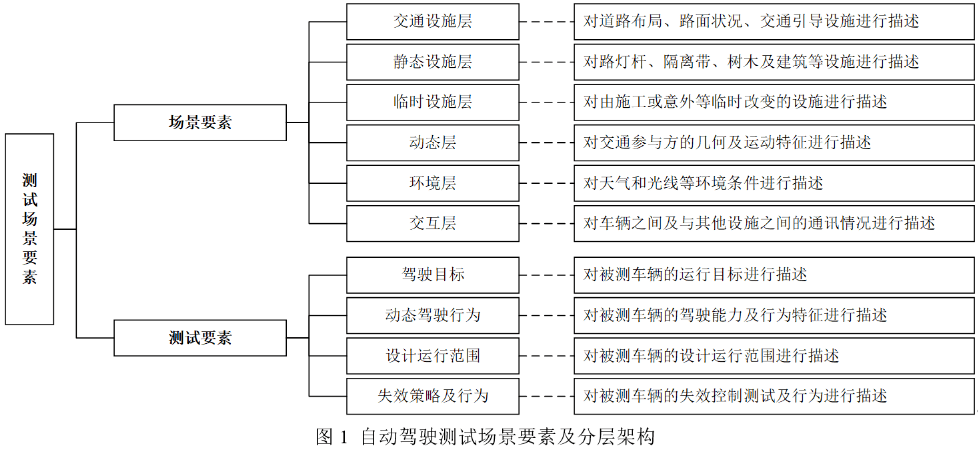
(1)对现有场景定义与架构进行了对比分析,并提出测试场景应涵盖场景要素和测试要素的共计10层信息;
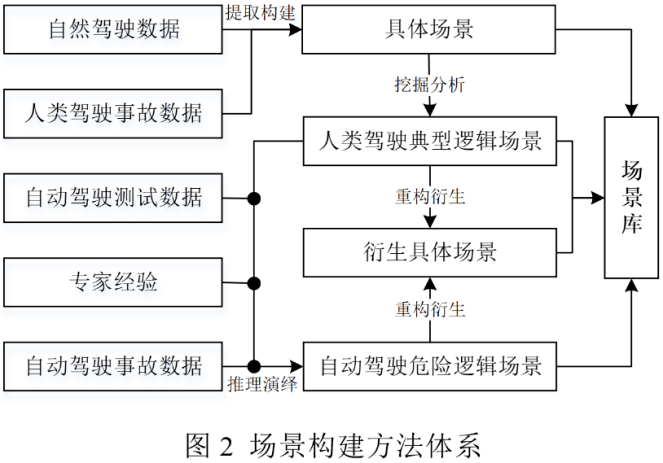
(2)归纳提出了包括具体场景直接构建、人类驾驶典型逻辑场景挖掘分析、无人驾驶危险逻辑场景推理演绎和具体场景重构衍生的场景构建方法体系;
(3)从基于场景片段测试、多场景片段拼接的测试和融合交通流的测试3个维度,系统梳理了主流虚拟场景测试应用方法;
(4)从场景构建方法链和工具链的角度,针对基于大数据挖掘方法扩充场景信息源、拓展挖掘无人驾驶风险因子、对接无人驾驶测试的场景构建标准体系提出了研究展望。
论文综述了无人驾驶汽车测试场景构建的关键技术,为无人驾驶汽车测试与评价提供参考,为无人驾驶汽车安全水平提升及产业落地提供助力。
为全面反映汽车智能网联技术的研究进展,《汽车工程》特别邀请清华大学教授担任客座主编,共同策划并组织“汽车智能网联技术”专刊。本期专刊得到了国内外汽车开发团队的积极响应,中国工程院钟志华院士团队,密西根大学彭晖教授,以及清华大学、吉林大学、工业与信息化部计算机与微电子发展研究中心等科研院所纷纷发表最新研究成果。
· 清华大学钟志华院士团队研究综述:软件定义汽车技术体系的研究 · 广汽新能源研发中心:车用燃料电池热管理性能仿真与试验研究 · 锂离子电池多因素动态生热率模型 · 基于NMPC的智能汽车纵横向综合轨迹跟踪控制 · 基于SOC⁃OCV优化曲线与EKF的锂离子电池荷电状态全局估计 · 基于接地特性的轮胎滚阻与抓地性能评价方法返回搜狐,查看更加多
